This project showcases an autonomous lane‑tracking robot car built on a Raspberry Pi 3 B+, a USB webcam, and an L298N motor driver. Using real‑time OpenCV image processing and a PID control loop, it evolved from a simple frame‑threshold prototype to a smooth, efficient tracker. All housed on a custom 3D‑printed chassis. View the GitHub repo for more details.
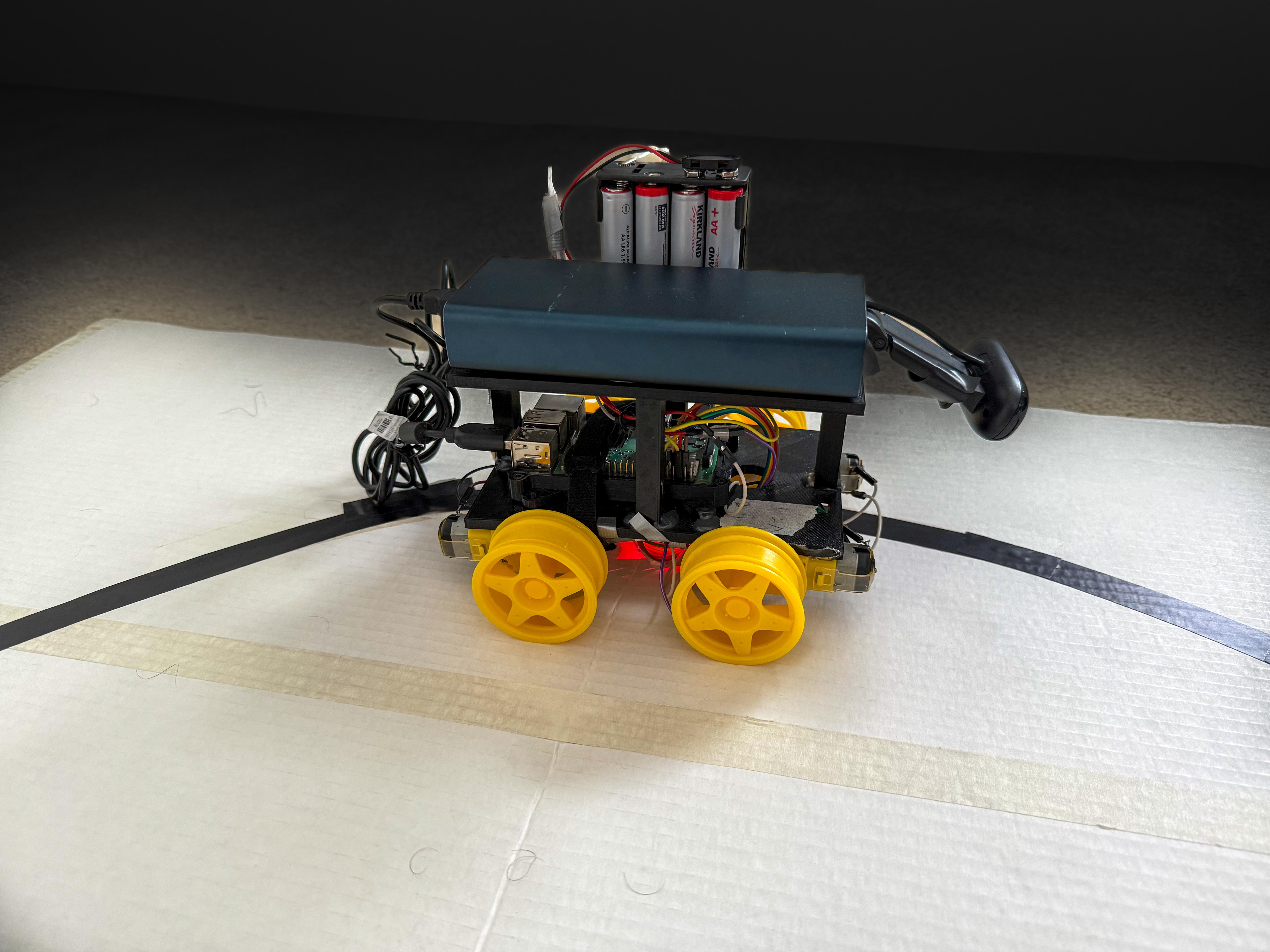
Lane-Tracking Robot Car
Project Created: 2025